仿人机械臂
项目简介
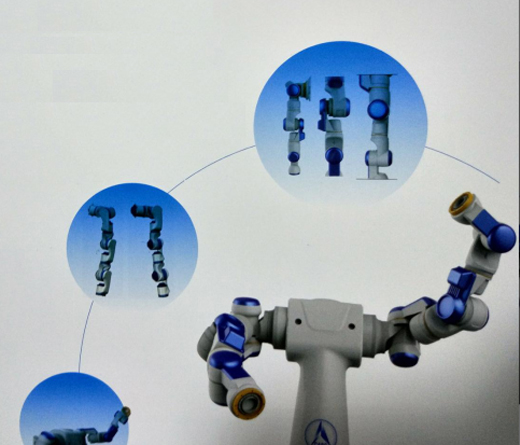
仿人机械臂采用全新的仿人型机器人设计理念。采用7自由度仿人型轻巧“手臂”的构型,具有基于实时以太网EtherCAT的“小脑”可以完成高效高精度的安全运动控制,具有ROS的“大脑”能够完成视觉、力觉信息的综合处理。仿人机械臂根据用户需求具有单臂、双臂两种产品组合方案。
主要技术指标:
- 最大负载2.5kg;
- 机械臂重量<8kg;
- 重复定位精度:±0.1mm;
- 工作半径:≥550mm;
- 通讯接口:EtherCAT
项目水平
国内领先。
项目进展
项目已进入中试阶段。
项目价值
智能灵活的大脑、24V安全供电使得该产品能够满足商务及生活服务机器人产品与人类密切接触的需求,小巧的本体、灵活的操作、人机协同的作业能力使得它也能够快速部署到劳动密集型的生产线上。该项目技术已在国家载人航天器上应用,是在机器人领域具有应用前景的军转民项目。
上一篇:五相电机SPWM驱动系统
下一篇:多功能智能型车载系统